মৌলিক জ্যামিতি#
এই আর্টিকেলে আমরা ইউক্লিডীয় স্থানে বিন্দুর উপর মৌলিক অপারেশনগুলো বিবেচনা করব যা সম্পূর্ণ বিশ্লেষণাত্মক জ্যামিতির ভিত্তি গঠন করে। প্রতিটি বিন্দু $\mathbf r$ এর জন্য আমরা $\mathbf 0$ থেকে $\mathbf r$ এর দিকে নির্দেশিত ভেক্টর $\vec{\mathbf r}$ বিবেচনা করব। পরবর্তীতে আমরা $\mathbf r$ এবং $\vec{\mathbf r}$ এর মধ্যে পার্থক্য করব না এবং বিন্দু শব্দটি ভেক্টর এর সমার্থক হিসেবে ব্যবহার করব।
লিনিয়ার অপারেশন#
দ্বিমাত্রিক ও ত্রিমাত্রিক উভয় বিন্দুই লিনিয়ার স্পেস বজায় রাখে, অর্থাৎ এদের জন্য বিন্দুর যোগ এবং বিন্দুকে কোনো সংখ্যা দিয়ে গুণ সংজ্ঞায়িত। এখানে দ্বিমাত্রিকের জন্য সেই মৌলিক ইমপ্লিমেন্টেশনগুলো দেওয়া হলো:
struct point2d {
ftype x, y;
point2d() {}
point2d(ftype x, ftype y): x(x), y(y) {}
point2d& operator+=(const point2d &t) {
x += t.x;
y += t.y;
return *this;
}
point2d& operator-=(const point2d &t) {
x -= t.x;
y -= t.y;
return *this;
}
point2d& operator*=(ftype t) {
x *= t;
y *= t;
return *this;
}
point2d& operator/=(ftype t) {
x /= t;
y /= t;
return *this;
}
point2d operator+(const point2d &t) const {
return point2d(*this) += t;
}
point2d operator-(const point2d &t) const {
return point2d(*this) -= t;
}
point2d operator*(ftype t) const {
return point2d(*this) *= t;
}
point2d operator/(ftype t) const {
return point2d(*this) /= t;
}
};
point2d operator*(ftype a, point2d b) {
return b * a;
}এবং ত্রিমাত্রিক বিন্দু:
struct point3d {
ftype x, y, z;
point3d() {}
point3d(ftype x, ftype y, ftype z): x(x), y(y), z(z) {}
point3d& operator+=(const point3d &t) {
x += t.x;
y += t.y;
z += t.z;
return *this;
}
point3d& operator-=(const point3d &t) {
x -= t.x;
y -= t.y;
z -= t.z;
return *this;
}
point3d& operator*=(ftype t) {
x *= t;
y *= t;
z *= t;
return *this;
}
point3d& operator/=(ftype t) {
x /= t;
y /= t;
z /= t;
return *this;
}
point3d operator+(const point3d &t) const {
return point3d(*this) += t;
}
point3d operator-(const point3d &t) const {
return point3d(*this) -= t;
}
point3d operator*(ftype t) const {
return point3d(*this) *= t;
}
point3d operator/(ftype t) const {
return point3d(*this) /= t;
}
};
point3d operator*(ftype a, point3d b) {
return b * a;
}এখানে ftype হলো স্থানাঙ্কের জন্য ব্যবহৃত কোনো টাইপ, সাধারণত int, double বা long long।
ডট প্রোডাক্ট#
সংজ্ঞা#
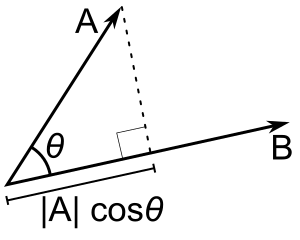
ভেক্টর $\mathbf a$ ও $\mathbf b$ এর ডট (বা স্কেলার) প্রোডাক্ট $\mathbf a \cdot \mathbf b$ দুটি অভিন্ন উপায়ে সংজ্ঞায়িত করা যায়। জ্যামিতিকভাবে এটি হলো প্রথম ভেক্টরের দৈর্ঘ্যের সাথে দ্বিতীয় ভেক্টরের প্রথমটির উপর অভিক্ষেপের দৈর্ঘ্যের গুণফল। নিচের চিত্র থেকে দেখা যায় এই অভিক্ষেপ হলো $|\mathbf a| \cos \theta$ যেখানে $\theta$ হলো $\mathbf a$ ও $\mathbf b$ এর মধ্যবর্তী কোণ। সুতরাং $\mathbf a\cdot \mathbf b = |\mathbf a| \cos \theta \cdot |\mathbf b|$।
ডট প্রোডাক্টের কিছু উল্লেখযোগ্য ধর্ম:
১. $\mathbf a \cdot \mathbf b = \mathbf b \cdot \mathbf a$ ২. $(\alpha \cdot \mathbf a)\cdot \mathbf b = \alpha \cdot (\mathbf a \cdot \mathbf b)$ ৩. $(\mathbf a + \mathbf b)\cdot \mathbf c = \mathbf a \cdot \mathbf c + \mathbf b \cdot \mathbf c$
অর্থাৎ এটি একটি বিনিময়যোগ্য ফাংশন যা উভয় আর্গুমেন্টের সাপেক্ষে লিনিয়ার। একক ভেক্টরগুলোকে নিম্নরূপ চিহ্নিত করি
$$\mathbf e_x = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}, \mathbf e_y = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}, \mathbf e_z = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix}.$$এই চিহ্নিতকরণে আমরা ভেক্টর $\mathbf r = (x;y;z)$-কে $r = x \cdot \mathbf e_x + y \cdot \mathbf e_y + z \cdot \mathbf e_z$ হিসেবে লিখতে পারি। এবং যেহেতু একক ভেক্টরের জন্য
$$\mathbf e_x\cdot \mathbf e_x = \mathbf e_y\cdot \mathbf e_y = \mathbf e_z\cdot \mathbf e_z = 1,\\ \mathbf e_x\cdot \mathbf e_y = \mathbf e_y\cdot \mathbf e_z = \mathbf e_z\cdot \mathbf e_x = 0$$আমরা দেখতে পাই যে স্থানাঙ্কের ক্ষেত্রে $\mathbf a = (x_1;y_1;z_1)$ ও $\mathbf b = (x_2;y_2;z_2)$ এর জন্য
$$\mathbf a\cdot \mathbf b = (x_1 \cdot \mathbf e_x + y_1 \cdot\mathbf e_y + z_1 \cdot\mathbf e_z)\cdot( x_2 \cdot\mathbf e_x + y_2 \cdot\mathbf e_y + z_2 \cdot\mathbf e_z) = x_1 x_2 + y_1 y_2 + z_1 z_2$$এটি ডট প্রোডাক্টের বীজগণিতিক সংজ্ঞাও। এটি থেকে আমরা এটি হিসাব করার ফাংশন লিখতে পারি।
ftype dot(point2d a, point2d b) {
return a.x * b.x + a.y * b.y;
}
ftype dot(point3d a, point3d b) {
return a.x * b.x + a.y * b.y + a.z * b.z;
}সমস্যা সমাধানের সময় ডট প্রোডাক্ট হিসাবের জন্য বীজগণিতিক সংজ্ঞা ব্যবহার করা উচিত, কিন্তু ব্যবহারের জন্য জ্যামিতিক সংজ্ঞা ও ধর্মগুলো মনে রাখা উচিত।
ধর্মসমূহ#
আমরা ডট প্রোডাক্টের মাধ্যমে অনেক জ্যামিতিক ধর্ম সংজ্ঞায়িত করতে পারি। উদাহরণস্বরূপ
১. $\mathbf a$ এর নর্ম (বর্গ দৈর্ঘ্য): $|\mathbf a|^2 = \mathbf a\cdot \mathbf a$ ২. $\mathbf a$ এর দৈর্ঘ্য: $|\mathbf a| = \sqrt{\mathbf a\cdot \mathbf a}$ ৩. $\mathbf a$-র $\mathbf b$ এর উপর অভিক্ষেপ: $\dfrac{\mathbf a\cdot\mathbf b}{|\mathbf b|}$ ৪. ভেক্টরদ্বয়ের মধ্যবর্তী কোণ: $\arccos \left(\dfrac{\mathbf a\cdot \mathbf b}{|\mathbf a| \cdot |\mathbf b|}\right)$ ৫. পূর্ববর্তী বিন্দু থেকে আমরা দেখতে পাই যে ডট প্রোডাক্ট ধনাত্মক যদি তাদের মধ্যবর্তী কোণ সূক্ষ্ম হয়, ঋণাত্মক যদি স্থূল হয় এবং শূন্য যদি তারা লম্ব হয়, অর্থাৎ সমকোণ গঠন করে।
লক্ষ্য করুন এই সব ফাংশন মাত্রা সংখ্যার উপর নির্ভর করে না, তাই দ্বিমাত্রিক ও ত্রিমাত্রিক ক্ষেত্রে একই হবে:
ftype norm(point2d a) {
return dot(a, a);
}
double abs(point2d a) {
return sqrt(norm(a));
}
double proj(point2d a, point2d b) {
return dot(a, b) / abs(b);
}
double angle(point2d a, point2d b) {
return acos(dot(a, b) / abs(a) / abs(b));
}পরবর্তী গুরুত্বপূর্ণ ধর্মটি দেখতে আমাদের সেই বিন্দুগুলোর সেট $\mathbf r$ দেখতে হবে যাদের জন্য কোনো নির্দিষ্ট ধ্রুবক $C$-তে $\mathbf r\cdot \mathbf a = C$। দেখা যায় এই বিন্দুর সেটটি হলো ঠিক সেই বিন্দুগুলো যাদের $\mathbf a$ এর উপর অভিক্ষেপ হলো $C \cdot \dfrac{\mathbf a}{|\mathbf a| ^ 2}$ বিন্দু এবং এরা $\mathbf a$-র সাথে লম্ব একটি হাইপারপ্লেন গঠন করে। নিচের ২D চিত্রে আপনি $\mathbf a$ ভেক্টরটি এবং একই ডট প্রোডাক্টবিশিষ্ট কয়েকটি ভেক্টর দেখতে পাবেন:

দ্বিমাত্রিকে এই ভেক্টরগুলো একটি রেখা গঠন করবে, ত্রিমাত্রিকে একটি সমতল গঠন করবে। লক্ষ্য করুন এই ফলাফল আমাদের দ্বিমাত্রিকে একটি রেখাকে $\mathbf r\cdot \mathbf n=C$ বা $(\mathbf r - \mathbf r_0)\cdot \mathbf n=0$ হিসেবে সংজ্ঞায়িত করতে দেয় যেখানে $\mathbf n$ হলো রেখার সাথে লম্ব ভেক্টর এবং $\mathbf r_0$ হলো রেখার উপর ইতিমধ্যে থাকা যেকোনো ভেক্টর এবং $C = \mathbf r_0\cdot \mathbf n$। একইভাবে ত্রিমাত্রিকে একটি সমতল সংজ্ঞায়িত করা যায়।
ক্রস প্রোডাক্ট#
সংজ্ঞা#
ধরুন ত্রিমাত্রিক স্থানে আপনার তিনটি ভেক্টর $\mathbf a$, $\mathbf b$ এবং $\mathbf c$ আছে যেগুলো নিচের চিত্রের মতো একটি সামান্তরিকে যুক্ত:

আপনি এর আয়তন কীভাবে হিসাব করবেন? স্কুল থেকে আমরা জানি যে ভূমির ক্ষেত্রফলকে উচ্চতা দিয়ে গুণ করতে হবে, যেটি হলো ভূমির সাথে লম্ব দিকে $\mathbf a$ এর অভিক্ষেপ। অর্থাৎ যদি আমরা $\mathbf b \times \mathbf c$-কে সেই ভেক্টর হিসেবে সংজ্ঞায়িত করি যা $\mathbf b$ ও $\mathbf c$ উভয়ের সাথে লম্ব এবং যার দৈর্ঘ্য $\mathbf b$ ও $\mathbf c$ দ্বারা গঠিত সামান্তরিকের ক্ষেত্রফলের সমান তাহলে $|\mathbf a\cdot (\mathbf b\times\mathbf c)|$ হবে সামান্তরিকের আয়তনের সমান। সম্পূর্ণতার জন্য বলি, $\mathbf b\times \mathbf c$ সবসময় এমনভাবে নির্দেশিত হবে যাতে $\mathbf b\times \mathbf c$ এর দৃষ্টিকোণ থেকে $\mathbf b$ ভেক্টর থেকে $\mathbf c$ ভেক্টরে ঘূর্ণন সবসময় ঘড়ির কাঁটার বিপরীতে হয় (নিচের চিত্র দেখুন)।

এটি ভেক্টর $\mathbf b$ ও $\mathbf c$ এর ক্রস (বা ভেক্টর) প্রোডাক্ট $\mathbf b\times \mathbf c$ এবং ভেক্টর $\mathbf a$, $\mathbf b$ ও $\mathbf c$ এর ট্রিপল প্রোডাক্ট $\mathbf a\cdot(\mathbf b\times \mathbf c)$ সংজ্ঞায়িত করে।
ক্রস ও ট্রিপল প্রোডাক্টের কিছু উল্লেখযোগ্য ধর্ম:
১. $\mathbf a\times \mathbf b = -\mathbf b\times \mathbf a$
২. $(\alpha \cdot \mathbf a)\times \mathbf b = \alpha \cdot (\mathbf a\times \mathbf b)$
৩. যেকোনো $\mathbf b$ ও $\mathbf c$ এর জন্য ঠিক একটি ভেক্টর $\mathbf r$ আছে যেন সব ভেক্টর $\mathbf a$ এর জন্য $\mathbf a\cdot (\mathbf b\times \mathbf c) = \mathbf a\cdot\mathbf r$।
আসলে যদি এরকম দুটি ভেক্টর $\mathbf r_1$ ও $\mathbf r_2$ থাকে তাহলে সব ভেক্টর $\mathbf a$ এর জন্য $\mathbf a\cdot (\mathbf r_1 - \mathbf r_2)=0$ যা কেবল $\mathbf r_1 = \mathbf r_2$ হলেই সম্ভব।
৪. $\mathbf a\cdot (\mathbf b\times \mathbf c) = \mathbf b\cdot (\mathbf c\times \mathbf a) = -\mathbf a\cdot( \mathbf c\times \mathbf b)$
৫. $(\mathbf a + \mathbf b)\times \mathbf c = \mathbf a\times \mathbf c + \mathbf b\times \mathbf c$।
আসলে সব ভেক্টর $\mathbf r$ এর জন্য সমীকরণের শৃঙ্খল প্রযোজ্য:
\[\mathbf r\cdot( (\mathbf a + \mathbf b)\times \mathbf c) = (\mathbf a + \mathbf b) \cdot (\mathbf c\times \mathbf r) = \mathbf a \cdot(\mathbf c\times \mathbf r) + \mathbf b\cdot(\mathbf c\times \mathbf r) = \mathbf r\cdot (\mathbf a\times \mathbf c) + \mathbf r\cdot(\mathbf b\times \mathbf c) = \mathbf r\cdot(\mathbf a\times \mathbf c + \mathbf b\times \mathbf c)\]
যা বিন্দু ৩ অনুসারে $(\mathbf a + \mathbf b)\times \mathbf c = \mathbf a\times \mathbf c + \mathbf b\times \mathbf c$ প্রমাণ করে।
৬. $|\mathbf a\times \mathbf b|=|\mathbf a| \cdot |\mathbf b| \sin \theta$ যেখানে $\theta$ হলো $\mathbf a$ ও $\mathbf b$ এর মধ্যবর্তী কোণ, কারণ $|\mathbf a\times \mathbf b|$ হলো $\mathbf a$ ও $\mathbf b$ দ্বারা গঠিত সামান্তরিকের ক্ষেত্রফলের সমান।
এই সব এবং একক ভেক্টরের জন্য নিম্নলিখিত সমীকরণ প্রযোজ্য দেওয়া থাকলে
$$\mathbf e_x\times \mathbf e_x = \mathbf e_y\times \mathbf e_y = \mathbf e_z\times \mathbf e_z = \mathbf 0,\\ \mathbf e_x\times \mathbf e_y = \mathbf e_z,~\mathbf e_y\times \mathbf e_z = \mathbf e_x,~\mathbf e_z\times \mathbf e_x = \mathbf e_y$$আমরা $\mathbf a = (x_1;y_1;z_1)$ ও $\mathbf b = (x_2;y_2;z_2)$ এর ক্রস প্রোডাক্ট স্থানাঙ্ক আকারে হিসাব করতে পারি:
$$\mathbf a\times \mathbf b = (x_1 \cdot \mathbf e_x + y_1 \cdot \mathbf e_y + z_1 \cdot \mathbf e_z)\times (x_2 \cdot \mathbf e_x + y_2 \cdot \mathbf e_y + z_2 \cdot \mathbf e_z) =$$$$(y_1 z_2 - z_1 y_2)\mathbf e_x + (z_1 x_2 - x_1 z_2)\mathbf e_y + (x_1 y_2 - y_1 x_2)\mathbf e_z$$যা আরো মার্জিত আকারেও লেখা যায়:
$$\mathbf a\times \mathbf b = \begin{vmatrix}\mathbf e_x & \mathbf e_y & \mathbf e_z \\ x_1 & y_1 & z_1 \\ x_2 & y_2 & z_2 \end{vmatrix},~a\cdot(b\times c) = \begin{vmatrix} x_1 & y_1 & z_1 \\ x_2 & y_2 & z_2 \\ x_3 & y_3 & z_3 \end{vmatrix}$$এখানে $| \cdot |$ হলো ম্যাট্রিক্সের নির্ণায়ক।
ক্রস প্রোডাক্টের একধরনের রূপ (যথা সুডো-স্কেলার প্রোডাক্ট) দ্বিমাত্রিক ক্ষেত্রেও বাস্তবায়ন করা যায়। যদি আমরা $\mathbf a$ ও $\mathbf b$ ভেক্টর দ্বারা গঠিত সামান্তরিকের ক্ষেত্রফল হিসাব করতে চাই তাহলে $|\mathbf e_z\cdot(\mathbf a\times \mathbf b)| = |x_1 y_2 - y_1 x_2|$ হিসাব করতে হবে। একই ফলাফল পাওয়ার আরেকটি উপায় হলো $|\mathbf a|$ (সামান্তরিকের ভূমি) কে উচ্চতা দিয়ে গুণ করা, যা $90^\circ$ ঘোরানো $\mathbf a$ ভেক্টরের উপর $\mathbf b$ ভেক্টরের অভিক্ষেপ যা হলো $\widehat{\mathbf a}=(-y_1;x_1)$। অর্থাৎ, $|\widehat{\mathbf a}\cdot\mathbf b|=|x_1y_2 - y_1 x_2|$ হিসাব করা।
যদি আমরা চিহ্ন বিবেচনা করি তাহলে ক্ষেত্রফল ধনাত্মক হবে যদি $\mathbf a$ থেকে $\mathbf b$-তে ঘূর্ণন (অর্থাৎ $\mathbf e_z$ বিন্দুর দৃষ্টিকোণ থেকে) ঘড়ির কাঁটার বিপরীতে হয় এবং ঋণাত্মক অন্যথায়। এটি সুডো-স্কেলার প্রোডাক্ট সংজ্ঞায়িত করে। লক্ষ্য করুন এটি $|\mathbf a| \cdot |\mathbf b| \sin \theta$ এর সমানও যেখানে $\theta$ হলো $\mathbf a$ থেকে $\mathbf b$ পর্যন্ত ঘড়ির কাঁটার বিপরীতে গণনা করা কোণ (এবং ঋণাত্মক যদি ঘূর্ণন ঘড়ির কাঁটার দিকে হয়)।
আসুন এই সবকিছু ইমপ্লিমেন্ট করি!
point3d cross(point3d a, point3d b) {
return point3d(a.y * b.z - a.z * b.y,
a.z * b.x - a.x * b.z,
a.x * b.y - a.y * b.x);
}
ftype triple(point3d a, point3d b, point3d c) {
return dot(a, cross(b, c));
}
ftype cross(point2d a, point2d b) {
return a.x * b.y - a.y * b.x;
}ধর্মসমূহ#
ক্রস প্রোডাক্টের ক্ষেত্রে, এটি শূন্য ভেক্টরের সমান হয় যদি এবং কেবল যদি ভেক্টর $\mathbf a$ ও $\mathbf b$ সমরেখ হয় (তারা একটি সাধারণ রেখা গঠন করে, অর্থাৎ সমান্তরাল)। একই কথা ট্রিপল প্রোডাক্টের ক্ষেত্রেও প্রযোজ্য, এটি শূন্য হয় যদি এবং কেবল যদি ভেক্টর $\mathbf a$, $\mathbf b$ ও $\mathbf c$ সমতলীয় হয় (তারা একটি সাধারণ সমতল গঠন করে)।
এটি থেকে আমরা রেখা ও সমতল সংজ্ঞায়িত করার সার্বজনীন সমীকরণ পেতে পারি। একটি রেখা তার দিক ভেক্টর $\mathbf d$ ও একটি প্রারম্ভিক বিন্দু $\mathbf r_0$ দ্বারা অথবা দুটি বিন্দু $\mathbf a$ ও $\mathbf b$ দ্বারা সংজ্ঞায়িত করা যায়। এটি $(\mathbf r - \mathbf r_0)\times\mathbf d=0$ বা $(\mathbf r - \mathbf a)\times (\mathbf b - \mathbf a) = 0$ হিসেবে সংজ্ঞায়িত। সমতলের ক্ষেত্রে, এটি তিনটি বিন্দু $\mathbf a$, $\mathbf b$ ও $\mathbf c$ দ্বারা $(\mathbf r - \mathbf a)\cdot((\mathbf b - \mathbf a)\times (\mathbf c - \mathbf a))=0$ হিসেবে অথবা প্রারম্ভিক বিন্দু $\mathbf r_0$ ও এই সমতলে থাকা দুটি দিক ভেক্টর $\mathbf d_1$ ও $\mathbf d_2$ দ্বারা $(\mathbf r - \mathbf r_0)\cdot(\mathbf d_1\times \mathbf d_2)=0$ হিসেবে সংজ্ঞায়িত করা যায়।
দ্বিমাত্রিকে সুডো-স্কেলার প্রোডাক্টও দুটি ভেক্টরের মধ্যে অরিয়েন্টেশন পরীক্ষা করতে ব্যবহার করা যায় কারণ প্রথম থেকে দ্বিতীয় ভেক্টরে ঘূর্ণন ঘড়ির কাঁটার বিপরীতে হলে এটি ধনাত্মক এবং অন্যথায় ঋণাত্মক। এবং, অবশ্যই, এটি পলিগনের ক্ষেত্রফল হিসাবেও ব্যবহার করা যায়, যা একটি ভিন্ন আর্টিকেলে বর্ণিত। ত্রিমাত্রিক স্থানে একই উদ্দেশ্যে ট্রিপল প্রোডাক্ট ব্যবহার করা যায়।
অনুশীলনী#
রেখার ছেদবিন্দু#
দ্বিমাত্রিকে একটি রেখা সংজ্ঞায়িত করার অনেক সম্ভাব্য উপায় আছে এবং আপনার সেগুলো একত্রিত করতে দ্বিধা করা উচিত নয়। উদাহরণস্বরূপ আমাদের দুটি রেখা আছে এবং আমরা তাদের ছেদবিন্দু খুঁজতে চাই। আমরা বলতে পারি প্রথম রেখার সব বিন্দু $\mathbf r = \mathbf a_1 + t \cdot \mathbf d_1$ হিসেবে প্যারামেট্রাইজ করা যায় যেখানে $\mathbf a_1$ হলো প্রারম্ভিক বিন্দু, $\mathbf d_1$ হলো দিক এবং $t$ কোনো বাস্তব প্যারামিটার। দ্বিতীয় রেখার সব বিন্দুকে $(\mathbf r - \mathbf a_2)\times \mathbf d_2=0$ সন্তুষ্ট করতে হবে। এটি থেকে আমরা সহজেই প্যারামিটার $t$ খুঁজতে পারি:
$$(\mathbf a_1 + t \cdot \mathbf d_1 - \mathbf a_2)\times \mathbf d_2=0 \quad\Rightarrow\quad t = \dfrac{(\mathbf a_2 - \mathbf a_1)\times\mathbf d_2}{\mathbf d_1\times \mathbf d_2}$$আসুন দুটি রেখার ছেদবিন্দু নির্ণয়ের ফাংশন ইমপ্লিমেন্ট করি।
point2d intersect(point2d a1, point2d d1, point2d a2, point2d d2) {
return a1 + cross(a2 - a1, d2) / cross(d1, d2) * d1;
}সমতলের ছেদবিন্দু#
তবে কখনো কখনো কিছু জ্যামিতিক অন্তর্দৃষ্টি ব্যবহার করা কঠিন হতে পারে। উদাহরণস্বরূপ, আপনাকে প্রারম্ভিক বিন্দু $\mathbf a_i$ ও দিক $\mathbf d_i$ দ্বারা সংজ্ঞায়িত তিনটি সমতল দেওয়া আছে এবং আপনি তাদের ছেদবিন্দু খুঁজতে চান। আপনি লক্ষ্য করতে পারেন যে আপনাকে কেবল সমীকরণ ব্যবস্থাটি সমাধান করতে হবে:
$$\begin{cases}\mathbf r\cdot \mathbf n_1 = \mathbf a_1\cdot \mathbf n_1, \\ \mathbf r\cdot \mathbf n_2 = \mathbf a_2\cdot \mathbf n_2, \\ \mathbf r\cdot \mathbf n_3 = \mathbf a_3\cdot \mathbf n_3\end{cases}$$জ্যামিতিক পদ্ধতির কথা চিন্তা করার বদলে, আপনি একটি বীজগণিতিক পদ্ধতি তৈরি করতে পারেন যা তৎক্ষণাৎ পাওয়া যায়। উদাহরণস্বরূপ, আপনি যদি ইতিমধ্যে একটি পয়েন্ট ক্লাস ইমপ্লিমেন্ট করে থাকেন, তাহলে ক্র্যামারের নিয়ম ব্যবহার করে এই ব্যবস্থা সমাধান করা আপনার জন্য সহজ হবে কারণ ট্রিপল প্রোডাক্ট কেবল সেই ম্যাট্রিক্সের নির্ণায়ক যা ভেক্টরগুলোকে কলাম হিসেবে নিলে পাওয়া যায়:
point3d intersect(point3d a1, point3d n1, point3d a2, point3d n2, point3d a3, point3d n3) {
point3d x(n1.x, n2.x, n3.x);
point3d y(n1.y, n2.y, n3.y);
point3d z(n1.z, n2.z, n3.z);
point3d d(dot(a1, n1), dot(a2, n2), dot(a3, n3));
return point3d(triple(d, y, z),
triple(x, d, z),
triple(x, y, d)) / triple(n1, n2, n3);
}এখন আপনি নিজে সাধারণ জ্যামিতিক অপারেশনের পদ্ধতি বের করার চেষ্টা করতে পারেন এই সবকিছুতে অভ্যস্ত হতে।